
前方交会绿色版
立即下载- 软件大小:14 KB
- 软件版本:最新版本
- 软件分类:应用软件
- 软件语言:简体中文
- 软件支持:Win All
- 发布时间:2021-09-15 21:07:24
- 软件评分:



- 软件介绍
- 相关下载
- 同类最新
- 软件攻略
- 评论留言
- 下载地址
前方交会绿色版是一款计算工具软件,officeba免费提供前方交会绿色版下载,更多前方交会绿色版相关版本就在officeba。
前方交会是一款运用三点获得第四点座标的计算方法。在其中必须观察数据信息(视角)和已经知道数据信息(座标)来数值,是测绘学(一级学科)与建筑工程测量(二级学科)所需运用的计算方法。前方交会页面简约,实际操作便捷,容积精巧,作用全方位,并且在已经知道点A、B、C上观察视角α1、α2、β1、β2,计算出来P点的座标。
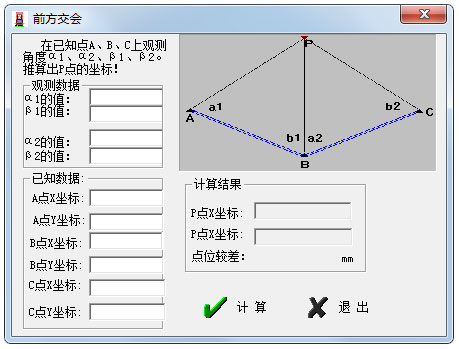
前方交会绿色版功能介绍
在已经知道A、B、C上观察视角a1、a2、b1、b2,计算出来p点座标。
观察数据信息:a1、a2、b1、b2
已经知道数据信息:A点X座标、A点Y座标、B点X座标、B点Y座标、C点X座标、C点Y座标
数值:P点X座标、P点Y座标
内容界定:
在2个已经知道点之上各自看待指定互相开展水平角观察,并依据已经知道点的座标及观察角值测算出未确定点座标的方式 。
配有A、B、P三点,A、B为已经知道座标的点,P为不明点,用仪器设备测出∠PAB和∠PBA,依据A、B的座标可求取P点的座标,这类方式 称为前方交会
前方交会绿色版疑难问题
1、精确测量中什幺是前方交会和后方交会?
它是施工测量中的基本上测量法,用水平仪。如今一般非常少用了。大约意思是那样的:前交是用水平仪在不一样地址(全是已经知道座标的)照准同一总体目标,自然我国标准上对视角和间距都是有一定的限定,用不一样组座标测算总体目标座标,还需要检核。后交是水平仪架在不明点上,向已经知道座标点照准,计算方式类似。
2、全站仪的前方交会法和后方交会法各自运用于什幺不同状况下?
一般用以好多个基准点不可以通视的状况下。之前也选用这二种方式 做操纵,数据加密基准点。正前方交还和后才交还用的基准点数量不一样的。
3、如何使用全站仪前方交会,必须用三棱镜照准幺?
最先务必要有最少两个基准点(倘若各自为A,B),在A上搭建仪器设备对中平整,看准B后水平角置零,随后看准总体目标点P(例如尖塔),记录下来水准视角∠BAP,随后将仪器设备搬往B上搭建仪器设备对中整,看准A后水平角置零,随后看准总体目标点P(例如尖塔),记录下来水准视角∠ABP.(那样测算仅有平面坐标,假如必须标高值话还需求量取仪器设备高,三棱镜高,与此同时还需要精确测量竖斜角)。
- 2021-08-12 office2016 2019 365正版超低价购买方法
 Karaoke Anything英文安装版(卡拉OK歌曲歌词删除器)简体 / 2.37 MB
Karaoke Anything英文安装版(卡拉OK歌曲歌词删除器)简体 / 2.37 MB
 QQ音乐qmc3文件转mp3解码器绿色免费版简体 / 5.88 MB
QQ音乐qmc3文件转mp3解码器绿色免费版简体 / 5.88 MB
 好易MP4格式转换器官方安装版简体 / 5.72 MB
好易MP4格式转换器官方安装版简体 / 5.72 MB
 网文快捕霏凡专版(CyberArticle)简体 / 12.07 MB
网文快捕霏凡专版(CyberArticle)简体 / 12.07 MB
 CodeIgniter中文手册CHM版(给PHP网站框架)简体 / 2.34 MB
CodeIgniter中文手册CHM版(给PHP网站框架)简体 / 2.34 MB
 山寨机刷机工具简体 / 82.50 MB
山寨机刷机工具简体 / 82.50 MB
 网文快捕专业版(cyberarticle)简体 / 11.56 MB
网文快捕专业版(cyberarticle)简体 / 11.56 MB
 看看宝盒安卓版
影音播放
看看宝盒安卓版
影音播放
 地摊记账王
生活服务
地摊记账王
生活服务
 今川课堂
效率办公
今川课堂
效率办公
 句子转换器
资讯阅读
句子转换器
资讯阅读
 中国教师研修网
效率办公
中国教师研修网
效率办公
 Painter安卓版
效率办公
Painter安卓版
效率办公
 嘿嘿连载安卓版
资讯阅读
嘿嘿连载安卓版
资讯阅读
 格子酱
系统工具
格子酱
系统工具
 Video
摄影摄像
Video
摄影摄像